Systèmes de vision en Machines Pick-and-Place
Les systèmes de vision pick-and-place modernes sont les "yeux et le cerveau" des équipements de fabrication électronique. Ils associent un matériel d'imagerie avancé à un logiciel intelligent pour atteindre une précision de l'ordre du micron dans le placement des composants. Ce guide couvre l'architecture du système, les fonctions de base, l'évolution technologique et les comparaisons détaillées des modèles.

I. Architecture du système
1. Composants matériels
- Caméras industrielles :
- Caméras linéaires (pour la reconnaissance à grande vitesse)
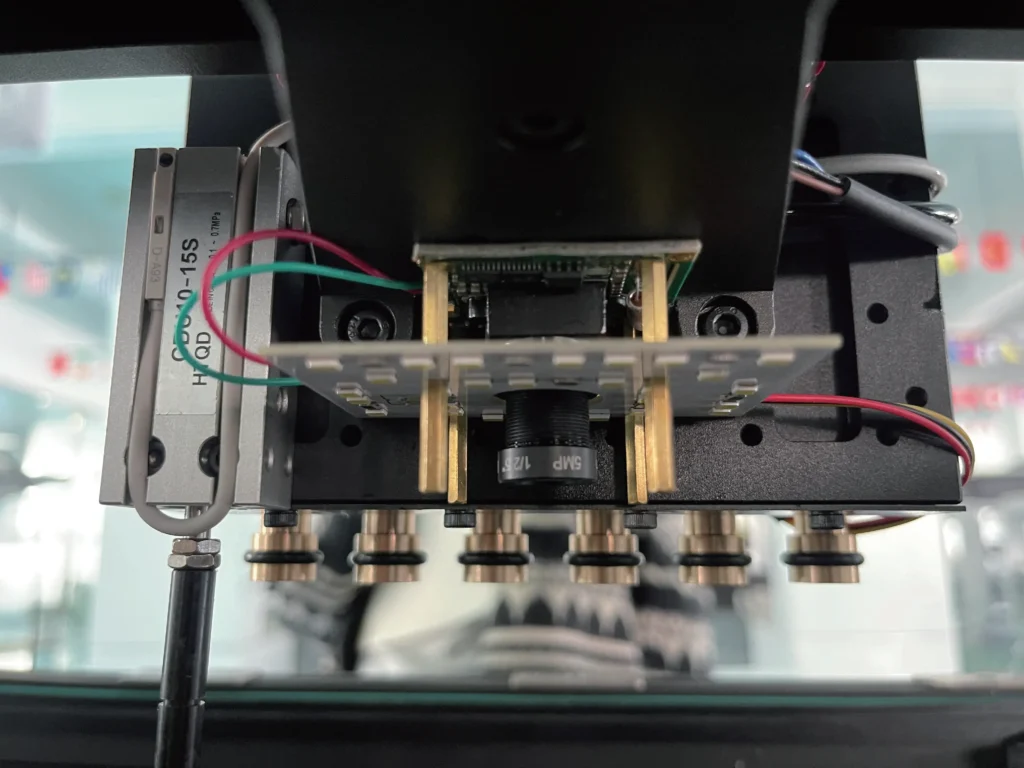
- Caméras en réseau (pour un positionnement précis, par exemple la caméra MARK de 5 Mpx dans l'espace de travail) HW-F5)
- Systèmes d'éclairage :
- Anneaux lumineux, éclairage coaxial (double source dans le HW-S6 pour l'adaptabilité des matériaux)
- Sources de lumière diffusante pour l'amélioration du contraste des composants
- Capteurs auxiliaires :
- Télémètres laser (détection des déformations du circuit imprimé)
- Capteurs d'autocontrôle du vide avec confirmation visuelle
- Capteurs de couple dans les applications robotiques collaboratives

2. Algorithmes logiciels
- Traitement d'images (détection des contours, correspondance des modèles)
- Modèles d'apprentissage profond (prédiction des défauts, optimisation des chemins)
- Systèmes de transformation des coordonnées (cartographie image-mécanique)
- Interfaces de simulation de circuits imprimés WYSIWYG
II. Capacités de base
1. Reconnaissance et positionnement des composants
- Les caméras volantes à grande vitesse capturent des microcomposants de 0402 (0,4×0,2″) à 0201
- Gère les conditions difficiles : sérigraphie floue, composants inclinés (HW-S6 algorithmes améliorés)
- Rotation des composants sur 360° avec une précision de 0,1° (HW-A8)
2. Étalonnage et compensation
- Étalonnage du centre de la buse (précision de ±0,05 mm)
- Compensation en temps réel du gauchissement du circuit imprimé (mesure laser + auto-ajustement)
- Correction de la dilatation thermique (compensation de la dérive environnementale)
- Mouvement de l'axe Z guidé par Spline pour une mise au point cohérente (HW-S6)
3. Contrôle de la qualité
- Contrôles préalables au placement : vérification de la polarité, déformation du plomb
- Inspection 3D après placement : validation des contacts avec les plages de soudure
- Systèmes de gestion de bibliothèques à composantes
III. Évolution de la technologie
1. Progrès en matière de précision
- De 0,1 mm (années 2000) à 0,02 mm aujourd'hui (HW-F5 0201 soutien)
- Systèmes de laboratoire permettant d'atteindre une précision de l'ordre du micron
2. Caractéristiques intelligentes
- Algorithmes basés sur des règles → Apprentissage automatique → Apprentissage profond
- Intégration MES pour le suivi des données de production
- Optimisation des trajets grâce à l'IA (HW-F5/S5)
3. Fusion de plusieurs capteurs
- Capteurs de force pour la surveillance de la pression de placement
- Analyse spectrale pour la vérification des matériaux
- Robotique collaborative avec évitement d'obstacles guidé par la vision
Technologies émergentes : Caméras événementielles (100 000+ CPH), capteurs à points quantiques pour les environnements à faible luminosité et systèmes hybrides de vision et de contrôle de la force.
IV. Comparaison des modèles : Systèmes de vision de la série HW

Machine Pick-and-Place
| Fonctionnalité | HW-A8/A6L | HW-F5/S5 | HW-S6 |
|---|---|---|---|
| Système de caméras | 8 caméras linéaires (A8) 6×400K pixels (A6L) | Hybride : Volant + Linéaire + Fixe Caméra MARK 500W | 5MP en vol + 6MP MARK Deux sources lumineuses |
| Min. Composant | 0402 (11mm) | 0201 (0,6×0,3mm) | 0201 avec reconnaissance renforcée |
| Vitesse | 15 000 CPH (A6L) | 84 000 CPH (S5 double bras) | 45 000 CPH |
| Caractéristiques spéciales | Bibliothèque de composants de base | Optimisation de la trajectoire de l'IA Compensation thermique | Axe Z cannelé Alimentateurs à trous traversants |
| Applications | SMT d'entrée de gamme | Microélectronique à mélange élevé | Tâches de précision exigeantes |
V. Scénarios d'application
1. Fabrication de DEL
- DEL de grande taille 3528/5050 sur des substrats flexibles (HW-A8L)
- Nécessite des sources lumineuses diffusantes pour le contraste
2. Emballage microélectronique
- 0201 résistances/condensateurs, puces QFN
- Des caméras 6MP+ sont nécessaires pour la vérification des numéros d'identification
3. Dispositifs d'alimentation
- Modules MOSFET/IGBT 40×40mm
- Buses spéciales et configurations d'éclairage requises
Critères de sélection : Équilibrer la vitesse (CPH), la précision (μm) et la compatibilité des composants. La production en grande série bénéficie de la configuration à double bras de la HW-S5, tandis que les environnements de recherche et développement peuvent préférer les capacités de reconnaissance améliorées de la HW-S6. (Références de données : Publications de l'IEEE Industrial Electronics Society 1990-2023 et documentation technique de HW)